← На главную








wassupnastya.space / 2019 — 2025Белка — первый российский автономный летающий робот для Международной космической станции
Робот разрабатывается в лаборатории НИИ механики МГУ для выполнения рутинных задач в условиях невесомости для российского сегмента Международной космической станции. Я работала в кросс-функциональной команде с инженерами и учёными.
белка.spaceРезультаты
Разработан дизайн эргономичного и функционального корпуса, обеспечивающий совместимость с инженерной конструкцией
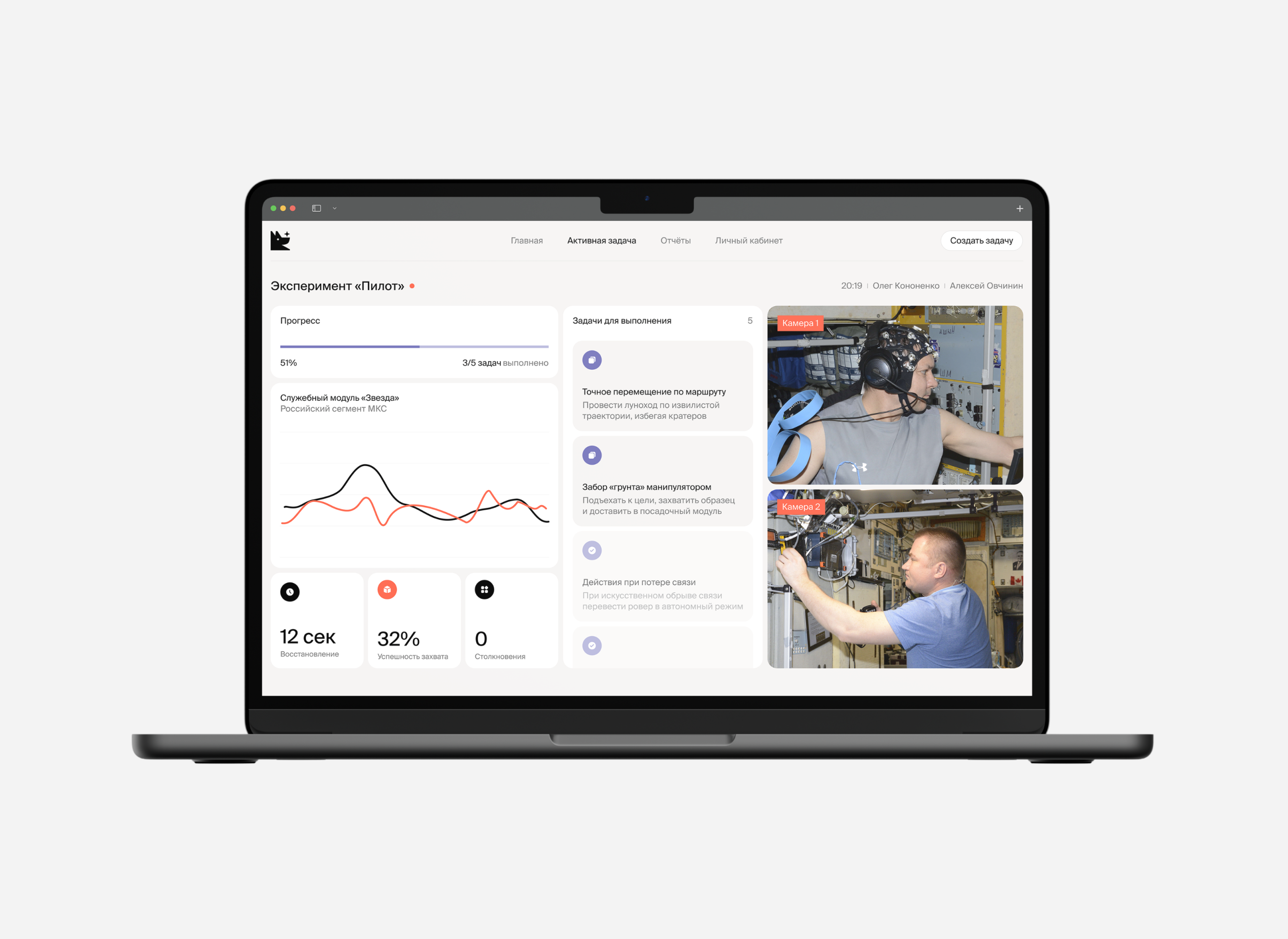
Предложена концепция интерфейса робота с перспективой её использования для разработки операционной системы
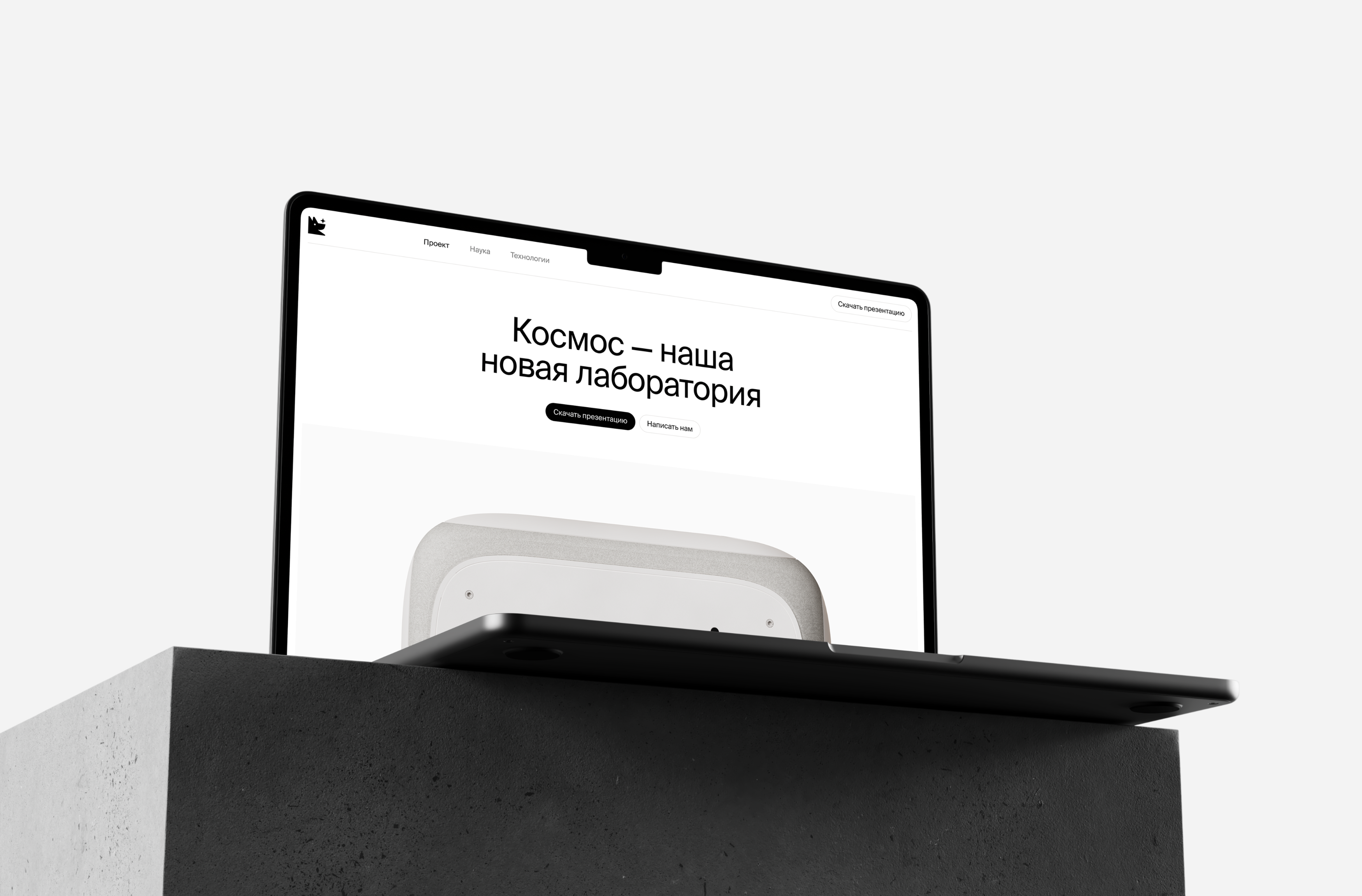
Создано целостное визуальное представление проекта, который способствует его продвижению и привлечению грантов на развитие
Проект был отмечен международным жюри на профессиональном конкурсе — Design.Now от издания Interior+Design
Исследование
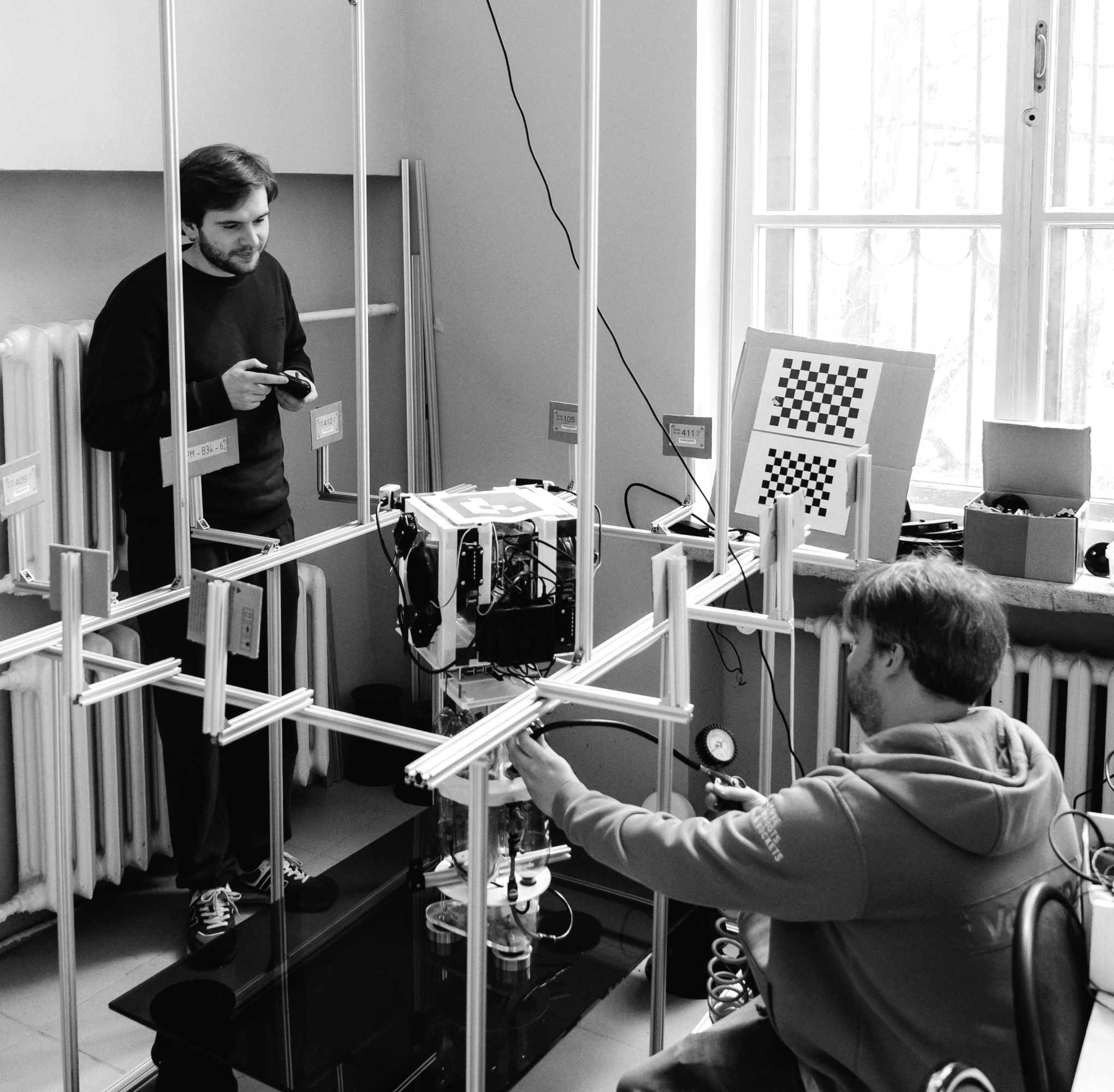
Главная сложность проекта заключалась в работе с уже утверждённой конструкцией. Когда я присоединилась к команде, инженерный прототип уже прошёл успешные испытания в условиях имитации невесомости.
Моей задачей стало глубокое изучение существующей платформы и проектирование решений, позволяющих адаптировать её для будущих модификаций.
Концепция
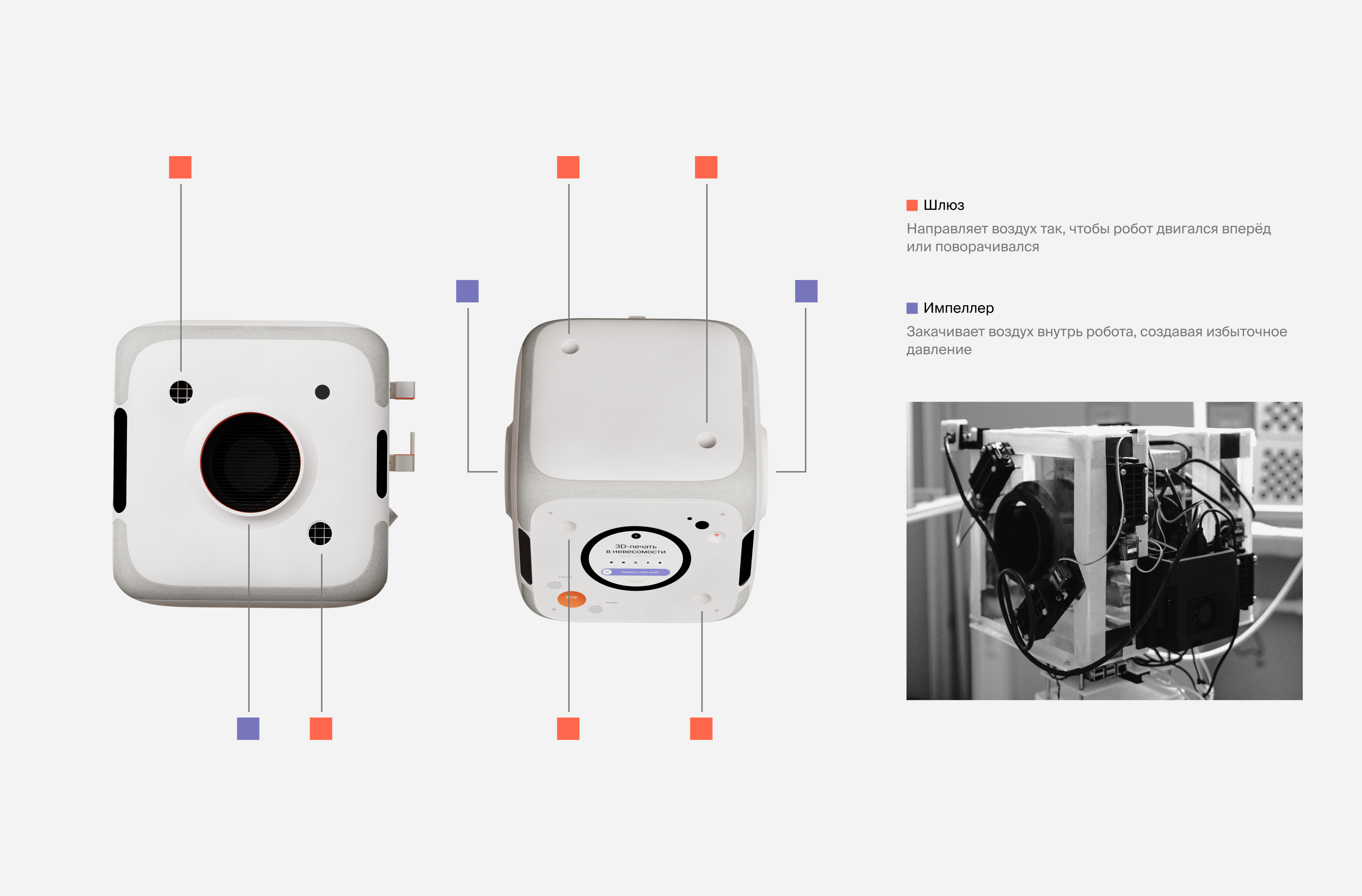
Белка — это манёвренный автономный робот, который будет летать по станции и помогать космонавтам проводить эксперименты. В его дизайне форма следует за функцией: робот, который будет помогать экипажу, сочетает в себе дружелюбную эргономику и высокотехнологичные элементы.
HMI дизайн
В основном взаимодействие с роботом происходит через сенсорный экран, но для надёжности важные действия продублированы механическими кнопками. Мною также предложена концепция операционной системы робота Belka OS.
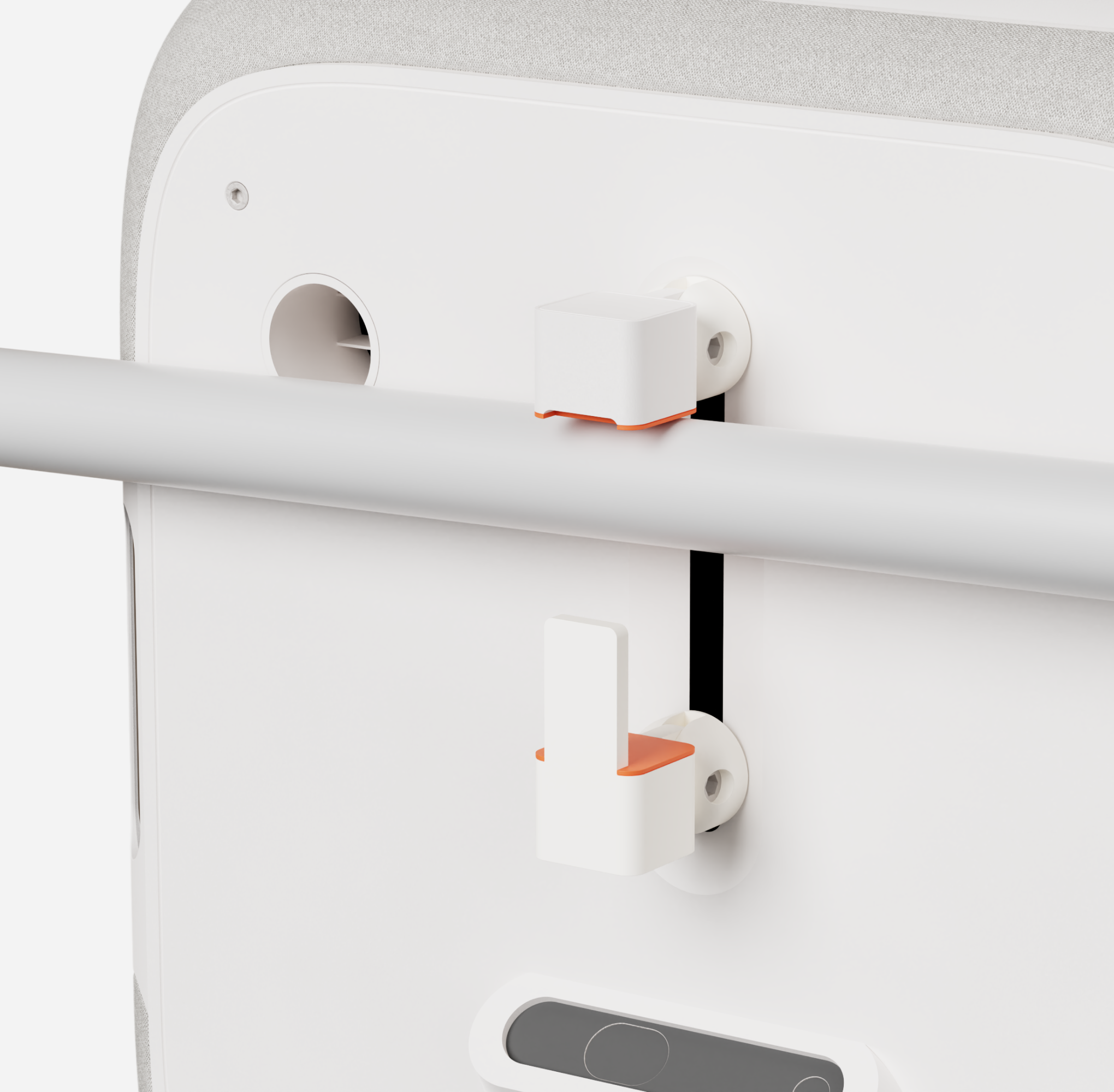
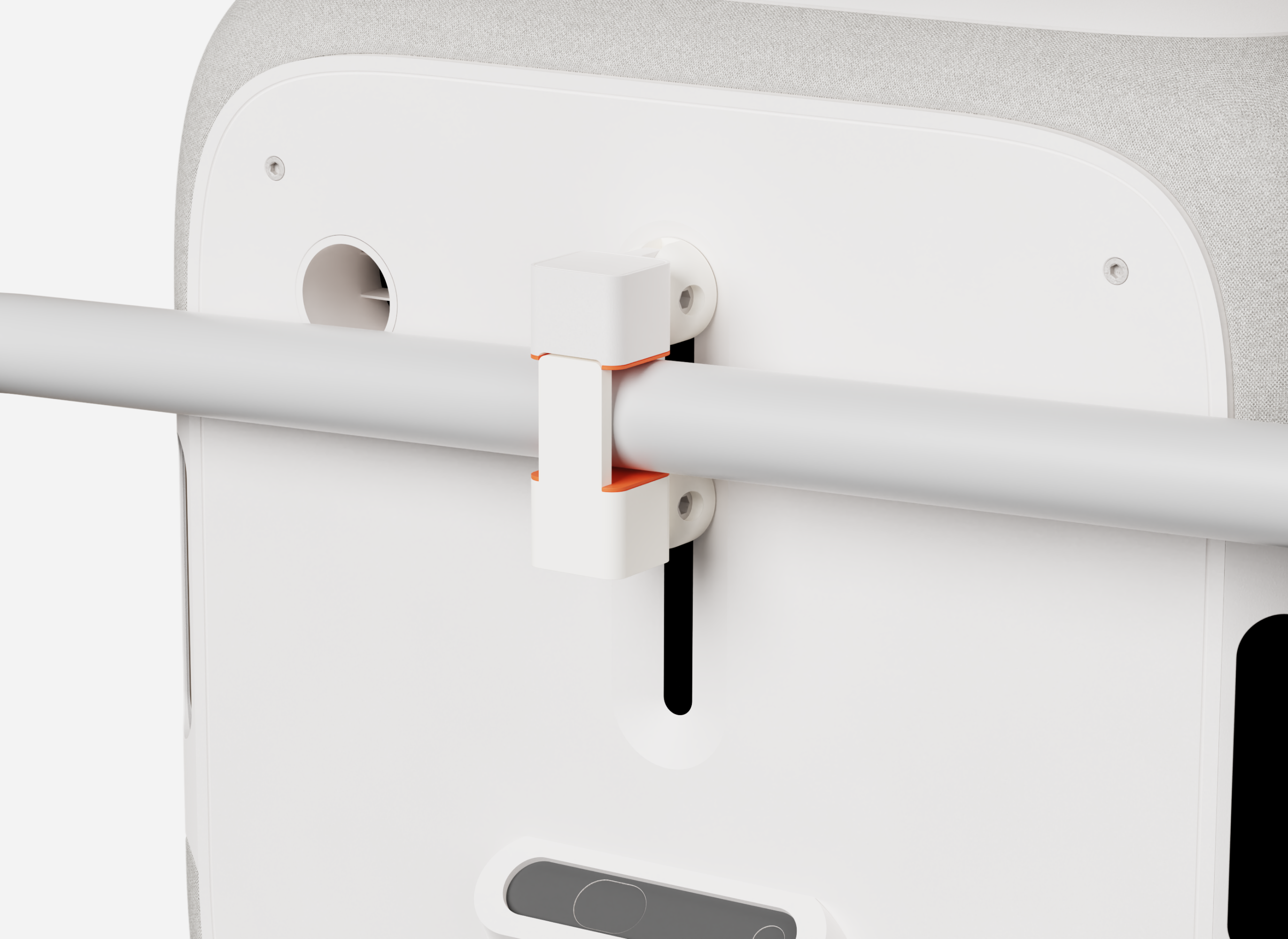
Прототипирование
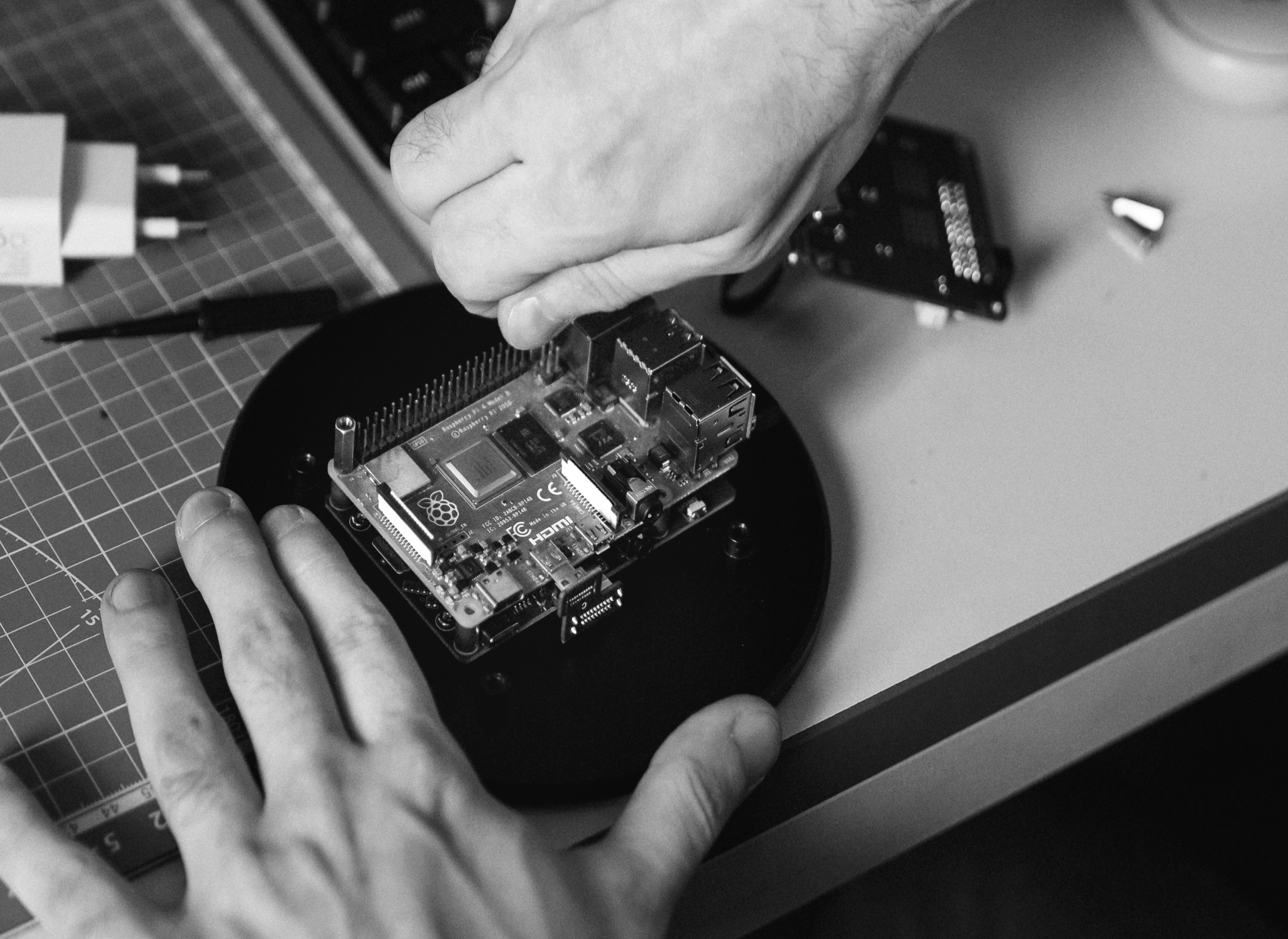
Для тестирования габаритов робота, расположения датчиков и взаимодействия с тач-интерфейсом мы собрали полноразмерный прототип из 24 деталей, напечатанных на 3D-принтере.
Брендинг
Я отвечала за разработку бренда, названия и фирменного стиля проекта. Основная идея — сочетание науки и современных технологий, что отразилось в балансе между академической строгостью и энергией стартапа.
От дизайна робота до интерфейсов и рекламы — всё работает в единой концепции, что усиливает продвижение и привлечение грантов.
Развитие проекта
На текущий момент проект находится в стадии активной разработки. На основе первого прототипа мы уже вносим изменения в конструкцию. За проектом можно следить на сайте белка.space.
Партнёры проекта: МГУ им. М. В. Ломоносова, НИИ механики МГУ. При поддержке РКК «Энергия».
Фотографии, используемые в концепции интерфейса: Олег Кононенко / Роскосмос
Другие проекты
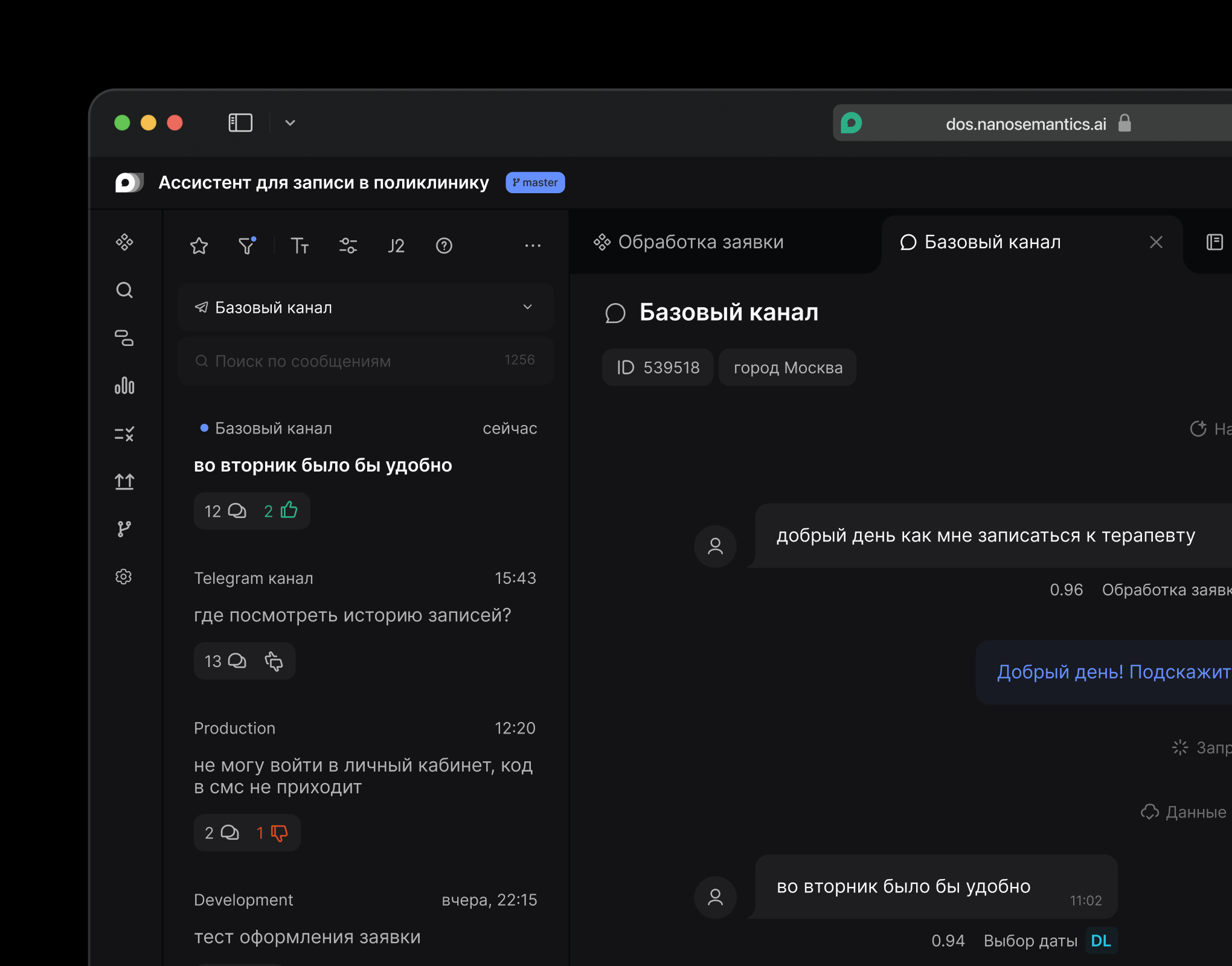
Сделала редизайн журнала диалогов для среды разработки чат-ботов, увеличив количество ежедневных пользователей раздела.
Посмотреть кейс →